gRPC client implementation of an Arm component.
More...
#include <arm_client.hpp>
 Inheritance diagram for viam::sdk::impl::ArmClient:
Inheritance diagram for viam::sdk::impl::ArmClient: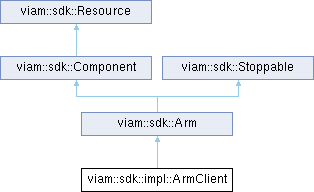
Public Types | |
| using | interface_type = Arm |
| Public Types inherited from viam::sdk::Arm | |
| using | MoveLimit = boost::variant<double, std::vector<double>> |
| A movement limit: either a single scalar applied uniformly, or per-joint values. | |
Public Member Functions | |
| ArmClient (std::string name, const ViamChannel &channel) | |
| const ViamChannel & | channel () const |
| pose | get_end_position (const ProtoStruct &extra) override |
| Get the current position of the end of the arm. | |
| void | move_to_position (const pose &pose, const ProtoStruct &extra) override |
| Move the end of the arm to. | |
| std::vector< double > | get_joint_positions (const ProtoStruct &extra) override |
| Lists the joint positions in degrees of every joint on a robot arm. | |
| void | move_to_joint_positions (const std::vector< double > &positions, const ProtoStruct &extra) override |
| Move each joint on the arm to the corresponding angle specified in. | |
| void | move_through_joint_positions (const std::vector< std::vector< double > > &positions, const Arm::MoveOptions &options, const ProtoStruct &extra) override |
| Move each joint on the arm through the positions specified in. | |
| bool | is_moving () override |
| Reports if the arm is in motion. | |
| ProtoStruct | get_status () override |
| Get the status of the arm. | |
| void | stop (const ProtoStruct &extra) override |
| Stops a resource from running. | |
| ProtoStruct | do_command (const ProtoStruct &command) override |
| Send/receive arbitrary commands to the resource. | |
| ::viam::sdk::KinematicsData | get_kinematics (const ProtoStruct &extra) override |
| Get the kinematics data associated with the arm. | |
| std::map< std::string, mesh > | get_3d_models (const ProtoStruct &extra) override |
Returns 3DModels associated with the calling arm. | |
| std::vector< GeometryConfig > | get_geometries (const ProtoStruct &extra) override |
Returns GeometryConfigs associated with the calling arm. | |
| virtual std::map< std::string, mesh > | get_3d_models (const ProtoStruct &extra)=0 |
Returns 3DModels associated with the calling arm. | |
| std::map< std::string, mesh > | get_3d_models () |
Returns 3DModels associated with the calling arm. | |
| pose | get_end_position () |
| Get the current position of the end of the arm. | |
| virtual pose | get_end_position (const ProtoStruct &extra)=0 |
| Get the current position of the end of the arm. | |
| std::vector< GeometryConfig > | get_geometries () |
Returns GeometryConfigs associated with the calling arm. | |
| virtual std::vector< GeometryConfig > | get_geometries (const ProtoStruct &extra)=0 |
Returns GeometryConfigs associated with the calling arm. | |
| std::vector< double > | get_joint_positions () |
| Lists the joint positions in degrees of every joint on a robot arm. | |
| virtual std::vector< double > | get_joint_positions (const ProtoStruct &extra)=0 |
| Lists the joint positions in degrees of every joint on a robot arm. | |
| virtual::viam::sdk::KinematicsData | get_kinematics (const ProtoStruct &extra)=0 |
| Get the kinematics data associated with the arm. | |
| inline ::viam::sdk::KinematicsData | get_kinematics () |
| Get the kinematics data associated with the arm. | |
| void | move_through_joint_positions (const std::vector< std::vector< double > > &positions, const MoveOptions &options) |
| Move each joint on the arm through the positions specified in. | |
| virtual void | move_through_joint_positions (const std::vector< std::vector< double > > &positions, const MoveOptions &options, const ProtoStruct &extra)=0 |
| Move each joint on the arm through the positions specified in. | |
| void | move_to_joint_positions (const std::vector< double > &positions) |
| Move each joint on the arm to the corresponding angle specified in. | |
| virtual void | move_to_joint_positions (const std::vector< double > &positions, const ProtoStruct &extra)=0 |
| Move each joint on the arm to the corresponding angle specified in. | |
| void | move_to_position (const pose &pose) |
| Move the end of the arm to. | |
| virtual void | move_to_position (const pose &pose, const ProtoStruct &extra)=0 |
| Move the end of the arm to. | |
| Public Member Functions inherited from viam::sdk::Arm | |
| pose | get_end_position () |
| Get the current position of the end of the arm. | |
| void | move_to_position (const pose &pose) |
| Move the end of the arm to. | |
| std::vector< double > | get_joint_positions () |
| Lists the joint positions in degrees of every joint on a robot arm. | |
| void | move_to_joint_positions (const std::vector< double > &positions) |
| Move each joint on the arm to the corresponding angle specified in. | |
| void | move_through_joint_positions (const std::vector< std::vector< double > > &positions, const MoveOptions &options) |
| Move each joint on the arm through the positions specified in. | |
| inline ::viam::sdk::KinematicsData | get_kinematics () |
| Get the kinematics data associated with the arm. | |
| std::map< std::string, mesh > | get_3d_models () |
Returns 3DModels associated with the calling arm. | |
| std::vector< GeometryConfig > | get_geometries () |
Returns GeometryConfigs associated with the calling arm. | |
| API | api () const override |
Returns the API associated with a particular resource. | |
| Public Member Functions inherited from viam::sdk::Component | |
| Name | get_resource_name () const override |
Returns the Name for a particular resource. | |
| Public Member Functions inherited from viam::sdk::Resource | |
| Resource (std::string name) | |
| virtual std::string | name () const |
| Return the resource's name. | |
| void | set_log_level (log_level) const |
| Set the log level for log messages originating from this Resource. | |
| Public Member Functions inherited from viam::sdk::Stoppable | |
| void | stop () |
| Stops a resource from running. | |
Additional Inherited Members | |
| Protected Member Functions inherited from viam::sdk::Arm | |
| Arm (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Component | |
| Component (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Resource | |
| Name | get_resource_name (const std::string &type) const |
| Protected Attributes inherited from viam::sdk::Resource | |
| LogSource | logger_ |
Detailed Description
gRPC client implementation of an Arm component.
Member Function Documentation
◆ do_command()
|
overridevirtual |
Send/receive arbitrary commands to the resource.
- Parameters
-
Command the command to execute.
- Returns
- The result of the executed command.
Implements viam::sdk::Arm.
◆ get_3d_models() [1/3]
|
inline |
Returns 3DModels associated with the calling arm.
- Returns
- A map of
3DModels associated with the calling arm
◆ get_3d_models() [2/3]
|
overridevirtual |
Returns 3DModels associated with the calling arm.
- Parameters
-
extra Any additional arguments to the method
- Returns
- A map of
3DModels associated with the calling arm
Implements viam::sdk::Arm.
◆ get_3d_models() [3/3]
|
virtual |
Returns 3DModels associated with the calling arm.
- Parameters
-
extra Any additional arguments to the method
- Returns
- A map of
3DModels associated with the calling arm
Implements viam::sdk::Arm.
◆ get_end_position() [1/3]
|
inline |
Get the current position of the end of the arm.
- Returns
- The
poserepresenting the end position of the arm.
◆ get_end_position() [2/3]
|
overridevirtual |
Get the current position of the end of the arm.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- The
poserepresenting the end position of the arm.
Implements viam::sdk::Arm.
◆ get_end_position() [3/3]
|
virtual |
Get the current position of the end of the arm.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- The
poserepresenting the end position of the arm.
Implements viam::sdk::Arm.
◆ get_geometries() [1/2]
|
overridevirtual |
Returns GeometryConfigs associated with the calling arm.
- Parameters
-
extra Any additional arguments to the method
Implements viam::sdk::Arm.
◆ get_geometries() [2/2]
|
virtual |
Returns GeometryConfigs associated with the calling arm.
- Parameters
-
extra Any additional arguments to the method
Implements viam::sdk::Arm.
◆ get_joint_positions() [1/2]
|
overridevirtual |
Lists the joint positions in degrees of every joint on a robot arm.
- Parameters
-
extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ get_joint_positions() [2/2]
|
virtual |
Lists the joint positions in degrees of every joint on a robot arm.
- Parameters
-
extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ get_kinematics() [1/3]
|
inline |
Get the kinematics data associated with the arm.
- Returns
- A variant of kinematics data, with the type indicating the format of the data.
◆ get_kinematics() [2/3]
|
overridevirtual |
Get the kinematics data associated with the arm.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- A variant of kinematics data; URDF variants may include meshes by filepath.
Implements viam::sdk::Arm.
◆ get_kinematics() [3/3]
|
virtual |
Get the kinematics data associated with the arm.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- A variant of kinematics data; URDF variants may include meshes by filepath.
Implements viam::sdk::Arm.
◆ get_status()
|
overridevirtual |
Get the status of the arm.
- Returns
- A
ProtoStructcontaining the status of the arm.
Implements viam::sdk::Arm.
◆ is_moving()
|
overridevirtual |
Reports if the arm is in motion.
Implements viam::sdk::Arm.
◆ move_through_joint_positions() [1/3]
|
overridevirtual |
Move each joint on the arm through the positions specified in.
- Parameters
-
positions options optional specifications to be obeyed during the motion. extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ move_through_joint_positions() [2/3]
|
inline |
Move each joint on the arm through the positions specified in.
- Parameters
-
positions options optional specifications to be obeyed during the motion. TODO consider replacing vector vector with xtensor array, and also if it may be possible to specify or constrain dimensionality of the array in advance.
◆ move_through_joint_positions() [3/3]
|
virtual |
Move each joint on the arm through the positions specified in.
- Parameters
-
positions options optional specifications to be obeyed during the motion. extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ move_to_joint_positions() [1/3]
|
inline |
Move each joint on the arm to the corresponding angle specified in.
- Parameters
-
positions
◆ move_to_joint_positions() [2/3]
|
overridevirtual |
Move each joint on the arm to the corresponding angle specified in.
- Parameters
-
positions extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ move_to_joint_positions() [3/3]
|
virtual |
Move each joint on the arm to the corresponding angle specified in.
- Parameters
-
positions extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ move_to_position() [1/3]
|
inline |
Move the end of the arm to.
- Parameters
-
pose.
◆ move_to_position() [2/3]
|
overridevirtual |
Move the end of the arm to.
- Parameters
-
pose. pose The destination pose for the arm. extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ move_to_position() [3/3]
|
virtual |
Move the end of the arm to.
- Parameters
-
pose. pose The destination pose for the arm. extra Any additional arguments to the method.
Implements viam::sdk::Arm.
◆ stop()
|
overridevirtual |
Stops a resource from running.
- Parameters
-
extra Extra arguments to pass to the resource's stopmethod.
Implements viam::sdk::Stoppable.
The documentation for this class was generated from the following file:
- src/viam/sdk/components/private/arm_client.hpp