A Motor represents physical hardware that controls the rotation of an axle.
More...
#include "components/motor.hpp"
 Inheritance diagram for viam::sdk::Motor:
Inheritance diagram for viam::sdk::Motor: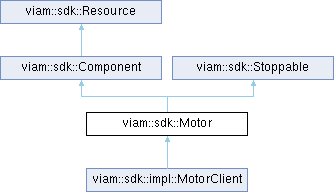
Classes | |
| struct | power_status |
| Information about power-state of the motor. More... | |
| struct | properties |
| Features that the specific motor supports. More... | |
Public Types | |
| typedef double | position |
Public Member Functions | |
| void | set_power (double power_pct) |
| Sets the percentage of the motor's total power that should be employed. | |
| virtual void | set_power (double power_pct, const ProtoStruct &extra)=0 |
| Sets the percentage of the motor's total power that should be employed. | |
| void | go_for (double rpm, double revolutions) |
| Instructs the motor to turn at a specified speed, which is expressed in RPM, for a specified number of rotations relative to its starting position. | |
| virtual void | go_for (double rpm, double revolutions, const ProtoStruct &extra)=0 |
| Instructs the motor to turn at a specified speed, which is expressed in RPM, for a specified number of rotations relative to its starting position. | |
| void | go_to (double rpm, double position_revolutions) |
| Move the motor to a specific position that is relative to its home position at a specified speed which is expressed in RPM. | |
| virtual void | go_to (double rpm, double position_revolutions, const ProtoStruct &extra)=0 |
| Move the motor to a specific position that is relative to its home position at a specified speed which is expressed in RPM. | |
| void | set_rpm (double rpm) |
| Move the motor indefinitely at a specified speed which is expressed in RPM. | |
| virtual void | set_rpm (double rpm, const ProtoStruct &extra)=0 |
| Move the motor indefinitely at a specified speed which is expressed in RPM. | |
| void | reset_zero_position (double offset) |
| Sets the current position of the motor as the new zero position. | |
| virtual void | reset_zero_position (double offset, const ProtoStruct &extra)=0 |
| Sets the current position of the motor as the new zero position. | |
| position | get_position () |
| Reports the position of the robot's motor relative to its zero position. | |
| virtual position | get_position (const ProtoStruct &extra)=0 |
| Reports the position of the robot's motor relative to its zero position. | |
| properties | get_properties () |
| Returns the properties of the motor which comprises the booleans indicating which optional features the robot's motor supports. | |
| virtual properties | get_properties (const ProtoStruct &extra)=0 |
| Returns the properties of the motor which comprises the booleans indicating. | |
| power_status | get_power_status () |
| virtual power_status | get_power_status (const ProtoStruct &extra)=0 |
| virtual bool | is_moving ()=0 |
| Reports if a component is in motion. | |
| virtual ProtoStruct | get_status ()=0 |
| Get the status of the motor. | |
| virtual ProtoStruct | do_command (const ProtoStruct &command)=0 |
| Send/receive arbitrary commands to the resource. | |
| std::vector< GeometryConfig > | get_geometries () |
Returns GeometryConfigs associated with the calling motor. | |
| virtual std::vector< GeometryConfig > | get_geometries (const ProtoStruct &extra)=0 |
Returns GeometryConfigs associated with the calling motor. | |
| API | api () const override |
Returns the API associated with a particular resource. | |
| Public Member Functions inherited from viam::sdk::Component | |
| Name | get_resource_name () const override |
Returns the Name for a particular resource. | |
| Public Member Functions inherited from viam::sdk::Resource | |
| Resource (std::string name) | |
| virtual std::string | name () const |
| Return the resource's name. | |
| void | set_log_level (log_level) const |
| Set the log level for log messages originating from this Resource. | |
| Public Member Functions inherited from viam::sdk::Stoppable | |
| virtual void | stop (const ProtoStruct &extra)=0 |
| Stops a resource from running. | |
| void | stop () |
| Stops a resource from running. | |
Protected Member Functions | |
| Motor (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Component | |
| Component (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Resource | |
| Name | get_resource_name (const std::string &type) const |
Additional Inherited Members | |
| Protected Attributes inherited from viam::sdk::Resource | |
| LogSource | logger_ |
Detailed Description
A Motor represents physical hardware that controls the rotation of an axle.
This acts as an abstract base class to be inherited from by any drivers representing specific motor implementations. This class cannot be used on its own.
Member Function Documentation
◆ api()
|
overridevirtual |
Returns the API associated with a particular resource.
Implements viam::sdk::Resource.
◆ do_command()
|
pure virtual |
Send/receive arbitrary commands to the resource.
- Parameters
-
Command the command to execute.
- Returns
- The result of the executed command.
Implemented in viam::sdk::impl::MotorClient.
◆ get_geometries() [1/2]
|
inline |
Returns GeometryConfigs associated with the calling motor.
- Returns
- The requested
GeometryConfigs associated with the component.
◆ get_geometries() [2/2]
|
pure virtual |
Returns GeometryConfigs associated with the calling motor.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- The requested
GeometryConfigs associated with the component.
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ get_position() [1/2]
|
inline |
Reports the position of the robot's motor relative to its zero position.
- Exceptions
-
`Exception` if position reporting is not supported
◆ get_position() [2/2]
|
pure virtual |
Reports the position of the robot's motor relative to its zero position.
- Parameters
-
extra Any additional arguments to the method
- Exceptions
-
`Exception` if position reporting is not supported
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ get_power_status() [1/2]
|
inline |
- Returns
- The motor's current power_status
◆ get_power_status() [2/2]
|
pure virtual |
- Returns
- The motor's current power_status
- Parameters
-
extra Any additional arguments to the method
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ get_properties()
|
pure virtual |
Returns the properties of the motor which comprises the booleans indicating.
- Parameters
-
extra Any additional arguments to the method which optional features the robot's motor supports
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ get_status()
|
pure virtual |
Get the status of the motor.
- Returns
- A
ProtoStructcontaining the status of the motor.
Implemented in viam::sdk::impl::MotorClient.
◆ go_for() [1/2]
|
inline |
Instructs the motor to turn at a specified speed, which is expressed in RPM, for a specified number of rotations relative to its starting position.
- Parameters
-
rpm Speed of motor travel in rotations per minute revolutions Number of revolutions relative to motor's start position. If revolutions== 0, this will run the motor atrpmindefinetely. Ifrevolutions!= 0, this will block until the number of revolutions has been completed or another operation comes in.
- Exceptions
-
`Exception` if position reporting is not supported
◆ go_for() [2/2]
|
pure virtual |
Instructs the motor to turn at a specified speed, which is expressed in RPM, for a specified number of rotations relative to its starting position.
- Parameters
-
rpm Speed of motor travel in rotations per minute revolutions Number of revolutions relative to motor's start position. If revolutions== 0, this will run the motor atrpmindefinetely. Ifrevolutions!= 0, this will block until the number of revolutions has been completed or another operation comes in.extra Any additional arguments to the method.
- Exceptions
-
`Exception` if position reporting is not supported
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ go_to() [1/2]
|
inline |
Move the motor to a specific position that is relative to its home position at a specified speed which is expressed in RPM.
- Parameters
-
rpm Speed of motor travel in rotations per minute position_revolutions Number of revolutions relative to motor's home home/zero
- Exceptions
-
`Exception` if position reporting is not supported
◆ go_to() [2/2]
|
pure virtual |
Move the motor to a specific position that is relative to its home position at a specified speed which is expressed in RPM.
- Parameters
-
rpm Speed of motor travel in rotations per minute position_revolutions Number of revolutions relative to motor's home home/zero extra Any additional arguments to the method.
- Exceptions
-
`Exception` if position reporting is not supported
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ is_moving()
|
pure virtual |
Reports if a component is in motion.
Implemented in viam::sdk::impl::MotorClient.
◆ reset_zero_position() [1/2]
|
inline |
Sets the current position of the motor as the new zero position.
- Parameters
-
offset Motor position
- Exceptions
-
`Exception` if position reporting is not supported
◆ reset_zero_position() [2/2]
|
pure virtual |
Sets the current position of the motor as the new zero position.
- Parameters
-
offset Motor position extra Any additional arguments to the method
- Exceptions
-
`Exception` if position reporting is not supported
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ set_power() [1/2]
|
inline |
Sets the percentage of the motor's total power that should be employed.
- Parameters
-
power_pct Percentage of motor's power, between -1 and 1, where negative values indicate a backwards direction and positive values, a forward direction.
◆ set_power() [2/2]
|
pure virtual |
Sets the percentage of the motor's total power that should be employed.
- Parameters
-
power_pct Percentage of motor's power, between -1 and 1, where negative values indicate a backwards direction and positive values, a forward direction. extra Any additional arguments to the method.
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
◆ set_rpm() [1/2]
|
inline |
Move the motor indefinitely at a specified speed which is expressed in RPM.
- Parameters
-
rpm Speed of motor travel in rotations per minute
- Exceptions
-
`Exception` if position reporting is not supported
◆ set_rpm() [2/2]
|
pure virtual |
Move the motor indefinitely at a specified speed which is expressed in RPM.
- Parameters
-
rpm Speed of motor travel in rotations per minute extra Any additional arguments to the method.
- Exceptions
-
`Exception` if position reporting is not supported
Implemented in viam::sdk::impl::MotorClient, and viam::sdk::impl::MotorClient.
The documentation for this class was generated from the following file:
- src/viam/sdk/components/motor.hpp