A Base is the platform that the other parts of a mobile robot attach to.
More...
#include "components/base.hpp"
 Inheritance diagram for viam::sdk::Base:
Inheritance diagram for viam::sdk::Base: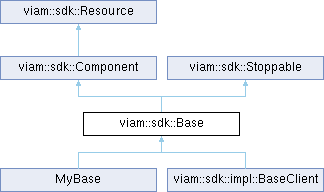
Classes | |
| struct | properties |
| Information about the physical base. More... | |
Public Member Functions | |
| void | move_straight (int64_t distance_mm, double mm_per_sec) |
| Move a robot's base in a straight line by a given distance. This method blocks until completed or cancelled. | |
| virtual void | move_straight (int64_t distance_mm, double mm_per_sec, const ProtoStruct &extra)=0 |
| Move a robot's base in a straight line by a given distance. This method blocks until completed or cancelled. | |
| void | spin (double angle_deg, double degs_per_sec) |
| Spins a robot's base by an given angle, expressed in degrees. This method blocks until completed or cancelled. | |
| virtual void | spin (double angle_deg, double degs_per_sec, const ProtoStruct &extra)=0 |
| Spins a robot's base by an given angle, expressed in degrees. This method blocks until completed or cancelled. | |
| void | set_power (const Vector3 &linear, const Vector3 &angular) |
| Sets the linear and angular power of a base -1 -> 1 in terms of power for each direction. | |
| virtual void | set_power (const Vector3 &linear, const Vector3 &angular, const ProtoStruct &extra)=0 |
| Sets the linear and angular power of a base -1 -> 1 in terms of power for each direction. | |
| void | set_velocity (const Vector3 &linear, const Vector3 &angular) |
| Set the linear and angular velocity of a base. | |
| virtual void | set_velocity (const Vector3 &linear, const Vector3 &angular, const ProtoStruct &extra)=0 |
| Set the linear and angular velocity of a base. | |
| virtual bool | is_moving ()=0 |
| Reports if the base is in motion. | |
| virtual ProtoStruct | get_status ()=0 |
| Get the status of the base. | |
| properties | get_properties () |
| Returns physical properties of the base (width, turning radius, wheel circumference) | |
| virtual properties | get_properties (const ProtoStruct &extra)=0 |
| Returns physical properties of the base (width, turning radius, wheel circumference) | |
| virtual ProtoStruct | do_command (const ProtoStruct &command)=0 |
| Send/receive arbitrary commands to the resource. | |
| std::vector< GeometryConfig > | get_geometries () |
Returns GeometryConfigs associated with the calling base. | |
| virtual std::vector< GeometryConfig > | get_geometries (const ProtoStruct &extra)=0 |
Returns GeometryConfigs associated with the calling base. | |
| API | api () const override |
Returns the API associated with a particular resource. | |
| Public Member Functions inherited from viam::sdk::Component | |
| Name | get_resource_name () const override |
Returns the Name for a particular resource. | |
| Public Member Functions inherited from viam::sdk::Resource | |
| Resource (std::string name) | |
| virtual std::string | name () const |
| Return the resource's name. | |
| void | set_log_level (log_level) const |
| Set the log level for log messages originating from this Resource. | |
| Public Member Functions inherited from viam::sdk::Stoppable | |
| virtual void | stop (const ProtoStruct &extra)=0 |
| Stops a resource from running. | |
| void | stop () |
| Stops a resource from running. | |
Protected Member Functions | |
| Base (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Component | |
| Component (std::string name) | |
| Protected Member Functions inherited from viam::sdk::Resource | |
| Name | get_resource_name (const std::string &type) const |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const properties &v) |
| bool | operator== (const properties &lhs, const properties &rhs) |
Additional Inherited Members | |
| Protected Attributes inherited from viam::sdk::Resource | |
| LogSource | logger_ |
Detailed Description
A Base is the platform that the other parts of a mobile robot attach to.
This acts as an abstract parent class to be inherited from by any drivers representing specific base implementations. This class cannot be used on its own.
Member Function Documentation
◆ api()
|
overridevirtual |
Returns the API associated with a particular resource.
Implements viam::sdk::Resource.
◆ do_command()
|
pure virtual |
Send/receive arbitrary commands to the resource.
- Parameters
-
Command the command to execute.
- Returns
- The result of the executed command.
Implemented in MyBase, and viam::sdk::impl::BaseClient.
◆ get_geometries() [1/2]
|
inline |
Returns GeometryConfigs associated with the calling base.
- Returns
- The requested
GeometryConfigs associated with the component.
◆ get_geometries() [2/2]
|
pure virtual |
Returns GeometryConfigs associated with the calling base.
- Parameters
-
extra Any additional arguments to the method.
- Returns
- The requested
GeometryConfigs associated with the component.
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
◆ get_properties()
|
pure virtual |
Returns physical properties of the base (width, turning radius, wheel circumference)
- Parameters
-
extra Any additional arguments to the method
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
◆ get_status()
|
pure virtual |
Get the status of the base.
- Returns
- A
ProtoStructcontaining the status of the base.
Implemented in MyBase, and viam::sdk::impl::BaseClient.
◆ is_moving()
|
pure virtual |
Reports if the base is in motion.
Implemented in MyBase, and viam::sdk::impl::BaseClient.
◆ move_straight() [1/2]
|
inline |
Move a robot's base in a straight line by a given distance. This method blocks until completed or cancelled.
- Parameters
-
distance_mm Desired travel distance in millimeters mm_per_sec Desired travel velocity in millimeters/second
◆ move_straight() [2/2]
|
pure virtual |
Move a robot's base in a straight line by a given distance. This method blocks until completed or cancelled.
- Parameters
-
distance_mm Desired travel distance in millimeters mm_per_sec Desired travel velocity in millimeters/second extra Any additional arguments to the method
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
◆ set_power() [1/2]
Sets the linear and angular power of a base -1 -> 1 in terms of power for each direction.
- Parameters
-
linear Desired linear power percentage (-1 <= % <= 1) for each direction angular Desired angular power percentage (-1 <= % <= 1) for each direction
◆ set_power() [2/2]
|
pure virtual |
Sets the linear and angular power of a base -1 -> 1 in terms of power for each direction.
- Parameters
-
linear Desired linear power percentage (-1 <= % <= 1) for each direction angular Desired angular power percentage (-1 <= % <= 1) for each direction extra Any additional arguments to the method
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
◆ set_velocity() [1/2]
Set the linear and angular velocity of a base.
- Parameters
-
linear Desired linear velocity in mm per second for each direction angular Desired angular velocity in degrees per second for each direction
◆ set_velocity() [2/2]
|
pure virtual |
Set the linear and angular velocity of a base.
- Parameters
-
linear Desired linear velocity in mm per second for each direction angular Desired angular velocity in degrees per second for each direction extra Any additional arguments to the method
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
◆ spin() [1/2]
|
inline |
Spins a robot's base by an given angle, expressed in degrees. This method blocks until completed or cancelled.
- Parameters
-
angle_deg Desired angle degs_per_sec Desired angular velocity
◆ spin() [2/2]
|
pure virtual |
Spins a robot's base by an given angle, expressed in degrees. This method blocks until completed or cancelled.
- Parameters
-
angle_deg Desired angle degs_per_sec Desired angular velocity extra Any additional arguments to the method
Implemented in MyBase, viam::sdk::impl::BaseClient, and viam::sdk::impl::BaseClient.
The documentation for this class was generated from the following file:
- src/viam/sdk/components/base.hpp